
მიმოხილვა
ხიდის ამწე, საყოველთაოდ ცნობილი, როგორც "სამართავი", არის ერთგვარი ამწევი მანქანა, რომელიც ფართოდ გამოიყენება სამრეწველო და სამთო საწარმოებში, მისი მოქმედი მექანიზმი შედგება სამი ძირითადად დამოუკიდებელი მართვის სისტემისგან, მანქანის მართვის სისტემისგან, სამაგრის მართვის სისტემისგან, K-DRIVE ინვერტორისგან. ზემოთ სამი მართვის სისტემა წარმატებით რეფორმირებული, ქვემოთ ძირითადად აღწერს ტრანსფორმაციის პროცესს მართვის სისტემის წინ და მის შემდეგ ფეხით.

სქემა უპირატესობები
- ველზე ორიენტირებული დენის ღია მარყუჟის ვექტორული კონტროლი, სრულად გათიშული ძრავის ცვლადები, დიდი დაბალი სიხშირის ბრუნი, სწრაფი რეაგირება და ა.შ.
- KD600 იღებს PG უფასო ვექტორული მართვის რეჟიმს და ვექტორიზებულ V/F რეჟიმს და აძლიერებს პირველი გადაცემის სიმძლავრის დონის კონფიგურაციას;
- სიხშირის დიაპაზონი: 0.5-600Hz სეგმენტის დაყენება, stepl-ess უწყვეტი რეგულირება;
- სამუშაო ძაბვის დიაპაზონი: 380V ± 20%, და ავტობუსის ძაბვა მყისიერად ეცემა 360VDC-მდე უპრობლემოდ მუშაობისთვის;
- გადატვირთვის სიმძლავრე: ნომინალური დენის 150%, დასაშვებია 1 წუთი; 200% რეიტინგული დენი, ნებადართულია 1s;
- ბრუნვის მახასიათებლები: საწყისი ბრუნვის მომენტი, ნომინალური ბრუნვის 2-ჯერ მეტი; დაბალი სიხშირის ბრუნვის მომენტი, ნომინალური ბრუნვის 1,6-ჯერ მეტი 1Hz-ზე; დამუხრუჭების ბრუნვის სიჩქარე აღემატება ნომინალურ ბრუნვას.
ოპერაციული მახასიათებლები
- ამწე ამწე მექანიზმს აქვს დიდი საწყისი ბრუნვის მომენტი, რომელიც ჩვეულებრივ აღემატება შეფასებული ბრუნვის 150%-ს. თუ გათვალისწინებულია გადატვირთვა და სხვა ფაქტორები, დაწყებისა და აჩქარების პროცესში უზრუნველყოფილი უნდა იყოს ნომინალური ბრუნვის მინიმუმ 200%.
- როდესაც ამწევი მექანიზმი ქვევით ეშვება, ძრავა იქნება რეგენერაციული ენერგიის გამომუშავების მდგომარეობაში და უნდა იყოს ენერგიის მოხმარების დამუხრუჭება ან რეგენერაციული კავშირი ქსელში;
- ამწევი მექანიზმის დატვირთვა მკვეთრად იცვლება, როდესაც აწეული ობიექტი ტოვებს ან შეეხება მიწას და სიხშირის გადამყვანს შეუძლია შეუფერხებლად გააკონტროლოს ზემოქმედების დატვირთვა;
- ამწის წინა და უკანა სამგზავრო მექანიზმის ასთეტრა მოძრაობის სიჩქარე არ არის მაღალი მექანიკური დიზაინის დროს, კონვერტორი შეიძლება გამოყენებულ იქნას სათანადო გადაჭარბებული სიჩქარისთვის მუშაობის ეფექტურობის გასაუმჯობესებლად.
მარტივი გაყვანილობის დიაგრამა
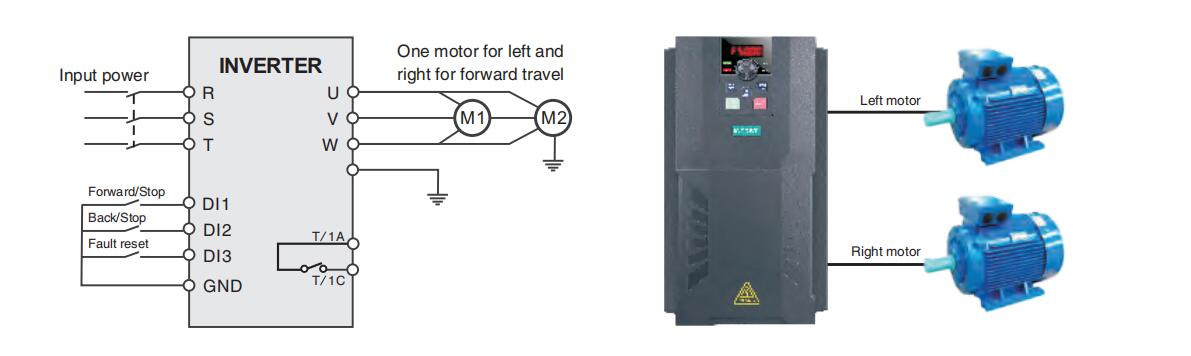
პარამეტრის დაყენებაng და აღწერა(მარცხენა და მარჯვენა ძრავის მოძრაობის პარამეტრები)
| პარამეტრი | ახსენი | პარამეტრის დაყენება | ახსენი |
| P0-00=0 | VF კონტროლი | P5-00=1 | წინ |
| P0-04=1 | გარე ტერმინალის დაწყების გაჩერება | P5-01=2 | განახორციელოს მოგვიანებით |
| P0-06=1 | ციფრული სიხშირის დაყენება | P6-00=2 | რელე 1 გაუმართაობის გამომავალი |
| P0-14=60.00 | მაქსიმალური სიხშირე | P4-01=1.6KW | დაკავშირებული ძრავის სიმძლავრე |
| P0-16=60.00 | ზედა ლიმიტის სიხშირე | P4-02=380V | ძრავის ნომინალური ძაბვა |
| P0-11=60.00 | ციფრული დაყენების სიხშირე | P4-04=3.3A | ძრავის ნომინალური დენი |
| P0-23=3.0s | აჩქარების დრო | P4-05=50Hz | ძრავის რეიტინგული სიხშირე |
| P0-24=2.0s | შენელების დრო | P4-06=960R/წთ | ძრავის რეიტინგული სიჩქარე |
| შენიშვნა: როდესაც ერთი სიხშირის გადამყვანი გამოიყენება ორი ძრავით, მკაცრად რეკომენდებულია შესაბამისი თერმული რელეს დაყენება თითოეული ძრავის წინა ბოლოში თითოეული ძრავის დასაცავად. | |||
ოპერაციის ეფექტის ანალიზი
KD600 სერიის სიხშირის გადამყვანმა განახორციელა სიხშირის კონვერტაციის ტრანსფორმაცია სამოგზაურო სისტემაზე და tr-ანსფორმაციის ეფექტი შედარებით იდეალურია, ძირითადად ნაჩვენებია:
- გაშვების დროს ხდება რბილი დაწყება და რბილი გაჩერება, რაც ამცირებს ზემოქმედებას ელექტრო ქსელზე;
- სიხშირის გადამყვანის გამოყენების შემდეგ, ორიგინალური გადაადგილების კონტაქტორი და სიჩქარის მარეგულირებელი რეზისტორი გამოტოვებულია, რაც არა მხოლოდ დაზოგავს ტექნიკურ ხარჯებს, არამედ ამცირებს შენარჩუნების დროებს, რითაც იზრდება გამომავალი;
- როდესაც მთავარი კაუჭი მუშაობს 5Hz~30Hz სიხშირეზე, ენერგიის დაზოგვის ეფექტი ძალიან აშკარაა;
- სიხშირის გადამყვანი გამოიყენება წინა და უკანა მოგზაურობის გასაკონტროლებლად, ხოლო მარცხენა და მარჯვენა სამგზავრო მექანიზმების სერიას შეუძლია გააცნობიეროს ზედმეტად სიხშირეზე მუშაობა. უსაფრთხოების უზრუნველსაყოფად, მნიშვნელოვნად გაუმჯობესებულია მუშაობის ეფექტურობა და ასევე მცირდება სამგზავრო აღჭურვილობის ტექნიკური დატვირთვა AC კონტაქტორების ხშირი გამოცვლის გამო.
დასკვნითი სიტყვა
სიხშირის გადამყვანი გამოიყენება წინა და უკანა სიარულის და მარცხენა და მარჯვენა სიარულის მექანიზმების სერიის გასაკონტროლებლად, რომელსაც შეუძლია განახორციელოს გადატვირთვის სამუშაოები, მნიშვნელოვნად გააუმჯობესოს მუშაობის ეფექტურობა უსაფრთხოების უზრუნველსაყოფად და ასევე შეამციროს მამოძრავებელი აღჭურვილობის ტექნიკური დატვირთვა. AC კონტაქტორების ხშირი შეცვლა.
განაცხადის საიტი

გამოქვეყნების დრო: ნოე-17-2023